

Please Leave Us A Message
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.
2024-04-01
Può interfaccia del bus dell'encoder dell'albero fotoelettrico assoluto
1 Introduzione L'encoder dell'angolo dell'albero fotoelettrico assoluto è un dispositivo di misurazione dell'angolo digitale che misura la posizione angolare e la velocità angolare dell'albero rotante in tempo reale. Converte le informazioni sull'angolo dell'albero in codici digitali sotto forma di gradi, minuti e secondi e la connessione del bus può realizzare una misurazione in tempo reale. Ha i vantaggi di alta affidabilità di lavoro, forte capacità anti-interferenza, alta precisione, memoria di spegnimento e così via. È ampiamente utilizzato nei sistemi di tracciamento e posizionamento della misurazione digitale come attrezzature per la gamma di tiro, teodolite digitale, radar e alcune grandi attrezzature militari.
In questi sistemi pratici di controllo delle applicazioni, a causa delle diverse strutture di dati dei sensori e dei rilevatori di ciascun sottosistema, il codificatore assoluto dell'albero fotoelettrico utilizzerà diversi metodi di comunicazione dei dati interni, principalmente tra cui RS232, porte seriali RS485 / 488, porte parallele, ecc. . Tuttavia, in specifiche applicazioni di ingegneria, i metodi di comunicazione di cui sopra sono spesso limitati dalla distanza di trasmissione e dal tasso di comunicazione. Negli ultimi anni, la comunicazione seriale si è sviluppata rapidamente e sono emerse una varietà di forme di bus di campo del sistema di controllo. Il bus CAN è uno dei più utilizzati. È l'abbreviazione del bus di rete locale del controller ed è un supporto efficace per il controllo distribuito e il controllo in tempo reale. Rete di comunicazione seriale. A causa delle alte prestazioni, dell'alta affidabilità e del design unico di Can Bus, è diventato l'autobus da campo più popolare e in tempo reale in patria e all'estero. Lo sviluppo e i cambiamenti dei metodi di comunicazione interna nel sistema di controllo fanno utilizzare l'encoder per misurare lo spostamento angolare e la velocità angolare forniscono un'interfaccia Bus CAN per soddisfare i requisiti di progettazione di Fieldbus dell'intero sistema di controllo.
2 Principio di lavoro dell'encoder e trasmissione dei dati
2.1 Principio di lavoro L'encoder è costituito da due parti: un dispositivo di acquisizione dei dati e un dispositivo di elaborazione dei dati. Il diagramma a blocchi strutturali è mostrato in 1. Il microcomputer a singolo chip è la parte centrale del sistema del circuito dell'encoder. Dopo aver raccolto i segnali dell'encoder (codice grossolana, codice fine medio, codice fine), è suddiviso da codice fine, correzione del canale del codice, aggiunta digitale, regolazione zero elettrica, elaborazione del software come grado, minuto e secondo conversione e infine visualizzare e Realizza l'interfaccia con il sistema di controllo.
2.2 Trasmissione di dati La trasmissione di dati tra l'encoder e il sistema di controllo può essere utilizzata in entrambe le modalità parallele e seriali. La trasmissione parallela trasmette i dati attraverso la porta parallela. Ogni dati richiede un nucleo del cavo dati. Ad esempio, è necessario un cavo a 24 core per un encoder a 24 bit. Pertanto, lo spazio d'uso è limitato ed è adatto solo a trasmissione a breve distanza e requisiti speciali. occasione. Nella trasmissione seriale, le informazioni sui dati vengono trasmesse in serie attraverso una coppia intrecciata e vengono aggiunti bit aggiuntivi in base a diversi protocolli di comunicazione per implementare funzioni come la correzione degli errori. Questa funzione può essere estesa ai sistemi di bus dati. La trasmissione seriale ha meno fili, meno hardware, a basso costo, distanza di trasmissione lunga e dati sicuri e affidabili.

2.3 Encoder proposto CAN Interfaccia bus Nel confronto completo di vari bus di campo, il sistema di comunicazione basato sul bus CAN ha molte caratteristiche eccellenti: il segnale di dati viene trasmesso dalla tensione differenziale; Il mezzo di trasmissione del bus può utilizzare coppia intrecciata, cavo coassiale e fibra ottica; può funzionare in modalità multi-master, modalità di comunicazione flessibile; può trasmettere e ricevere dati in modalità punto-punto, point-to-multipoint e di trasmissione globale; Le informazioni sui nodi sulla rete possono essere divise in diverse priorità per soddisfare diversi requisiti in tempo reale; tecnologia di arbitrato di autobus non distruttivo; I dati adottano la struttura del frame corto, ogni frame è 8BYTE e il tasso di errore dei dati è basso; Il sublayer MAC del livello di collegamento dati nel protocollo di comunicazione ha rigide funzionalità di rilevamento degli errori; Ha standard internazionali e buona apertura. Pertanto, nella trasformazione della modalità di comunicazione interna del sistema di tracciamento fotoelettrico, il bus CAN viene utilizzato come struttura del bus di comunicazione dati, quindi viene proposta l'interfaccia del bus coder.
3 Applicazione di codificatore può interfaccia bus nel sistema di tracciamento fotoelettrico
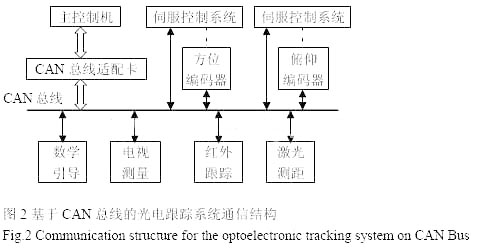
3.1 L'encoder viene utilizzato per il rilevamento della posizione del sistema di tracciamento fotoelettrico. L'encoder dell'asse fotoelettrico assoluto è un sensore per misurare l'angolo di azimut e pitch del sistema di tracciamento fotoelettrico nel sistema di tracciamento fotoelettrico. La struttura del bus interno del sistema di tracciamento fotoelettrico viene trasformata nel metodo di comunicazione del bus CAN. L'interfaccia del bus CAN ha le caratteristiche dell'interfaccia flessibile e del risparmio di linea. Allo stesso tempo, ha un microprocessore e può essere utilizzato come nodo intelligente nel sistema per inviare frame remoti direttamente ad altri dispositivi per ottenere un controllo intelligente. La Figura 2 è un diagramma della struttura di comunicazione del sistema di tracciamento fotoelettrico basato sul bus CAN. Il sistema di tracciamento fotoelettrico utilizza una singola struttura del bus seriale di bus CAN invece della struttura parallela di più metodi di comunicazione. Gli angoli di azimut e pitch misurati dai due encoder fotoelettrici vengono inviati alla macchina di controllo principale tramite il bus e la macchina di controllo principale elabora i dati di conseguenza. Attraverso il sistema di controllo del servo di controllo del bus, tutti i sottosistemi possono essere collegati insieme da una coppia di coppie intrecciate, che semplifica il cablaggio del sistema, migliora l'utilizzo complessivo del bus del sistema, la trasmissione dei dati in tempo reale e la scalabilità del sistema e l'errore del bit Il tasso è notevolmente ridotto.
3.2 NODO ENCODER COMPOSIZIONE HARDware per interfaccia del bus Bus
L'interfaccia del bus CAN è composta principalmente da microcomputer a singolo chip, controller del bus CAN, driver del bus CAN e hardware di isolamento fotoelettrico. Il circuito specifico dell'interfaccia di comunicazione del bus CAN è mostrato nella Figura 3.
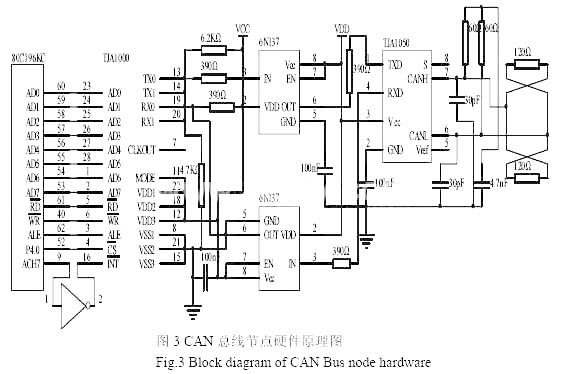
Il computer a chip singolo seleziona Intel80C196kc, che è un microcontrollore incorporato a 16 bit, che è più adatto per occasioni complesse di controllo in tempo reale. È anche responsabile dell'elaborazione dei dati dell'encoder e dell'inizializzazione del nodo del bus CAN. Il controller CAN seleziona SJA1000 di Philips Semiconductor per realizzare l'interfaccia di comunicazione dei dati tra il bus e il computer host (computer di controllo), supporta i protocolli CAN2.0A e CAN2.0B, ha un buffer di ricezione a 64 byte esteso e supporta il primo -out (FIFO) Principio, supporto di codici di identificazione a 11 bit e 29 bit, bit di comunicazione fino a 1 Mbps, può funzionare in modalità BasicCan e Pelican. Il conducente del bus CAN sceglie Philips TJA1050, che è un conducente del bus CAN ad alta velocità, che fornisce l'interfaccia tra il controller CAN e il bus fisico, realizza le funzioni di trasmissione differenziale e ricezione del bus CAN e ha una vasta gamma di modalità comune Sotto una forte capacità di ricezione differenziale di interferenza elettromagnetica, il livello di input è compatibile con dispositivi da 3,3 V e i nodi non alimentati non interferiscono con il bus. Unirsi a TJA1050 può garantire una comunicazione dati ad alta velocità. Per la sicurezza e la migliore capacità anti-jamming, l'uso di TJA1050 buone caratteristiche di prestazioni simmetriche, utilizzare terminali separati. Due piccoli condensatori di 30pf sono collegati in parallelo tra Canh e Canl e terra, che possono filtrare interferenze ad alta frequenza sul bus e una certa capacità di prevenire le radiazioni elettromagnetiche. Al fine di migliorare ulteriormente la capacità anti-interferenza del sistema, viene utilizzato un OptoCoupler 6N137 ad alta velocità tra il controller CAN SJA1000 e il driver CAN TJA1050 per formare un circuito di isolamento per ottenere l'isolamento galvanico. L'alimentatore VCC e VDD su entrambi i lati del 6N137 sono completamente isolati, il che può impedire al circuito contemporaneamente, due resistori di corrispondenza del bus da 120 Ω devono essere collegati ad entrambe le estremità del bus.
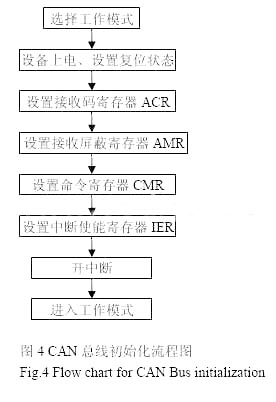
3.3 software nodo Progettare le informazioni sull'angolo (gradi, minuti e secondi) dell'encoder dell'asse fotoelettrico assoluto viene inviato dal controller CAN al bus CAN o dal bus CAN al buffer per ricevere automaticamente dal controller SJA1000 Bus. Il programma di comunicazione dell'interfaccia del bus CAN è composto dal sottoprogramma di inizializzazione, inviando sottoprogramma e ricezione del sottoprogramma. Innanzitutto selezionare la modalità di lavoro del bus CAN in base alle esigenze del sistema effettive. Qui, selezionare la modalità Pelican, oscillatore cristallino da 12 MHz, la velocità di trasmissione dei dati del bus è impostata su 500 kbit / s, ciascun nodo del bus deve impostare la stessa velocità di trasmissione dei dati per garantire la normale comunicazione. Determinare che la connessione fisica tra SJA1000 e MCU è affidabile e quindi inizializza il controller SJA1000. Nella modalità di ripristino SJA1000, impostare lo stato iniziale di ciascun registro. Il diagramma di flusso di inizializzazione è mostrato nella Figura 4. La trasmissione e la ricezione dei dati vengono eseguite dall'invio della subroutina e dalla subroutina di ricezione. L'ID messaggio determina il flusso dei dati del nodo. Quando si inviano dati, il principio di impostazione del segmento bit di Bit di ricezione ID del messaggio è: l'ID corrispondente del nodo che deve essere ricevuto il bit è 0 e i bit rimanenti sono 1. Quando si ricevono dati, è l'opposto. È giudicato da ID se si tratta di informazioni inviate a se stesse. Viene ricevuto, non filtrato.
4. Conclusione
Come bus di comunicazione a livello di campo, CAN Bus ha elevamente affidabilità e prestazioni dei costi. L'encoder dell'albero fotoelettrico assoluto con interfaccia Bus CAN lo rende più flessibile per l'uso nei sistemi di controllo.
Questo articolo è innovativo: l'interfaccia del bus CAN dell'encoder e la sua applicazione nel sistema di tracciamento fotoelettrico
Condividi:
Invia domanda
Ms. carol Dong
Numero Di Telefono:86-431-85543703
Fax:86-431---88634119
Mobile:+8613894866263
E-mail:sales@encoders.com.cn
Azienda Indirizzo:333Feiyue Donglu, Changchun City, Jilin Province. China, Changchun, Jilin
mobile Site
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.
Fill in more information so that we can get in touch with you faster
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.