

Please Leave Us A Message
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.
2024-01-03
Panoramica dell'encoder e dell'applicazione <br> L'encoder è un dispositivo elettromeccanico che può essere utilizzato per misurare il movimento meccanico o la posizione di destinazione. La maggior parte degli encoder utilizza sensori ottici per fornire segnali elettrici sotto forma di treni di impulsi, che a loro volta possono essere convertiti in movimenti, direzione o informazioni di posizione.
Gli encoder rotanti possono essere utilizzati per misurare il movimento di rotazione dell'albero. La Figura 1 mostra i componenti di base di un codificatore rotante, tra cui un diodo emetto di luce (LED), una ruota di codice e un sensore di luce sul retro della ruota del codice. Questa ruota di codice viene posizionata su un albero rotante con aree a forma di ventola opache e trasmesse alla luce disposte in forma codificata. Quando la ruota del codice ruota, i settori opachi bloccano la luce e i settori della trasmissione della luce consentono di passare la luce. Ciò produce impulsi ad onda quadra che possono essere compilati in informazioni corrispondenti o informazioni sul movimento. L'encoder è generalmente diviso in settori da 100 a 6000 per rivoluzione. Ciò dimostra che un encoder di 100 settori può fornire una precisione di 3,6 gradi mentre un codificatore di 6000 settori può fornire una precisione di 0,06 gradi.
Gli encoder lineari funzionano come encoder rotanti. Utilizza una striscia fissa e opaca per sostituire l'encoder rotante, con alcuni spazi per trasmissive alla luce sulla superficie della striscia opaca e il gruppo rivelatore a LED è fissato al corpo in movimento.

Figura 1. Componenti di un encoder ottico
Un solo encoder di uscita dell'impulso non è in grado di determinare l'angolo di rotazione, quindi non è utile. Se vengono utilizzati due canali di codice e la differenza di fase tra i loro settori è di 90 gradi (come mostrato in Fig. 2), i due canali di output dell'encoder di quadratura possono determinare le due informazioni di posizione e direzione di rotazione. Ad esempio, se il canale A conduce la fase, l'encoder ruota in senso orario. Se il canale B conduce la fase, la ruota del codice ruota in senso antiorario. Pertanto, monitorando il numero di impulsi e le informazioni sulla fase relativa tra i segnali A, B, è possibile ottenere le informazioni sulla posizione e sulla direzione della rotazione contemporaneamente.
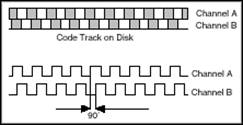
Figura 2. Segnali di output degli encoder di quadratura A e B
Inoltre, alcuni encoder di quadratura includono anche un terzo canale di uscita chiamato segnale zero o segnale di riferimento. Viene in uscita un singolo impulso per ogni rotazione di questo canale. È possibile utilizzare questo singolo impulso per calcolare accuratamente una posizione di riferimento. Nella maggior parte degli encoder, questo segnale è chiamato asse z o indice.
Finora questo articolo ha introdotto un codificatore di quadratura incrementale singola. Poiché entrambi i segnali A e B sono referenziati a terra, sono chiamati singoli e ogni segnale ha solo una (o solo una) linea. Un altro encoder comunemente usato è un encoder differenziale e i suoi segnali A e B hanno due fili. Le due linee del segnale A sono A 'e A e le due linee del segnale B sono rispettivamente B' e B. Poiché queste quattro righe emettono sempre un livello noto (0 V o VCC), questa struttura è anche chiamata struttura a push. Quando A è VCC, a 'è 0 V. Al contrario, quando A è 0 V, A 'è VCC. Nel caso di un encoder singolo, A è VCC o galleggiante. L'uso del rilevamento differenziale può garantire l'accuratezza del segnale, quindi gli encoder differenziali possono di solito essere utilizzati in ambienti con ampio rumore elettrico.
Con un encoder incrementale, è possibile misurare solo le informazioni sulla modifica della posizione (da cui è possibile calcolare la velocità e l'accelerazione del movimento), ma non è possibile determinare la posizione assoluta del bersaglio. Qui introdurremo un terzo tipo di encoder: Encoder assoluto, che può ottenere la posizione assoluta del target. Questo encoder, come l'encoder incrementale, ha settori opachi alternati e settori trasparenti. Tuttavia, un encoder assoluto utilizza una zona multi-componente sulla ruota del codice dell'encoder per formare un canale di codice concentrico, proprio come un anello di destinazione. Il percorso del codice concentrico inizia dal centro del codice encoder e si estende verso l'esterno fino all'esterno della scheda di codice. Ogni canale di codice ha il doppio della partizione rispetto al suo livello interno. Il primo livello, il canale di codice più interno, ha un solo settore di trasmissione della luce e un settore opaco; Il secondo strato al centro ha due settori di trasmissione della luce e due settori opachi; E ci sono quattro settori di trasmissione della luce e settori opachi per il terzo canale di codice. Se l'encoder ha canali di codice a 10 livelli, il canale di codice più esterno ha 512 settori; Se ci sono 16 canali di codice di livello, il canale di codice più esterno ha 32.767 settori.
Poiché l'encoder assoluto ha più di un numero di settori per canale di codice rispetto a quello al suo interno, il numero di settori forma un sistema di conteggio binario. In questo tipo di encoder, ogni canale di codice sulla ruota del codice corrisponde a una sorgente luminosa e un ricevitore. Ciò significa che un encoder a 10 strati richiede 10 gruppi di fonti di luce e ricevitori, mentre un coder a 16 strati richiede 16 gruppi di fonti di luce e ricevitori.
Il vantaggio di un encoder assoluto è che è possibile ridurre la velocità dell'encoder e fare in modo che il programmatore dell'encoder effettui solo una rivoluzione durante l'intero ciclo di movimento della macchina. Se la macchina viaggia da 10 pollici e l'encoder ha 16 bit di precisione, l'accuratezza della posizione della macchina è 10/65.536 o 0,00015 pollici. Se la macchina si allontana più a lungo, come 6 piedi, allora un encoder rotante grossolana può garantire che ogni piede sia tracciato; Un secondo stadio, chiamato encoder rotante fine, può tracciare le distanze entro 1 piede. Ciò significa che è possibile regolare l'encoder grossolana in modo che ruoti attorno all'intera distanza di 6 piedi; È inoltre possibile regolare l'encoder sottile in modo che possa risolvere un intervallo di 1 piede (o 12 pollici).
Come misurare l'uso di un encoder <br> Per utilizzare un encoder per la misurazione, deve esserci un dispositivo elettronico di base, il contatore. Il contatore di base genera un valore attraverso i suoi diversi canali di input per indicare il numero di bordi rilevati (cioè le variazioni da basso a alto o alto a basso nella forma d'onda). La maggior parte dei contatori ha tre input correlati in soglia, fonte e selezione su/giù. Il contatore registra il numero di eventi nell'input di origine e conta su o giù in base allo stato della riga di selezione su/giù. Ad esempio: se il bit di stato verso l'alto/giù è "alto", il contatore conta; Se il bit di stato verso l'alto/giù è "basso", il contatore conta verso il basso. La Figura 3 mostra uno schema a blocchi di banco semplificato.

Figura 3. Modello semplificato del contatore
Gli encoder di solito hanno 5 fili che devono essere collegati. Encoder diversi, il colore di queste linee non è lo stesso. Puoi usare questi fili per alimentare l'encoder e leggere i segnali A, B e Z. La Figura 4 mostra una tipica definizione dell'interfaccia per un encoder incrementale.

Figura 4. Interfaccia encoder incrementale
Il prossimo passo è decidere dove dovrebbero essere collegate queste linee. Come accennato in precedenza, il segnale A è collegato al terminale di origine e vengono contati gli impulsi nel suo segnale. Il segnale B è collegato alla porta di selezione su/giù. Collegare qualsiasi alimentatore CC +5 V alla connessione di alimentazione e terra nella maggior parte dei casi, è sufficiente solo una linea digitale per un dispositivo di acquisizione di dati.
Poiché i bordi del segnale vengono contati, la prossima cosa che devi considerare è come questi valori dovrebbero essere convertiti in informazioni sulla posizione. Il processo di conversione del valore del bordo in informazioni sulla posizione dipende dal tipo di codifica utilizzata. Esistono tre tipi di base di codifica: x1, x2 e x4.
Codifica x1
La Figura 5 mostra il numero di conteggi più-meno per un periodo di quadratura e il corrispondente tipo di codifica X1. Quando il canale A conduce il canale B, l'incremento si verifica sul bordo di salita del canale A. Quando il canale B conduce il canale A, il decremento si verifica sul bordo di caduta del canale A.
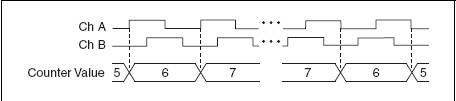
Figura 5. codifica X1
Codifica x2
La codifica X2 è simile al processo sopra, tranne per il fatto che ogni conteggio dei bordo del contatore un canale viene incrementato o decrementato, a seconda del canale in cui viene canalizzato. Il valore del contatore aumenterà di 2 o diminuirà di 2 ogni ciclo, come mostrato nella Figura 6.

Figura 6. codifica x2
Codifica x4
Nella modalità di codifica X4, il contatore aumenta anche o diminuisce su ciascun bordo dei canali A e B. Se il numero di contatori aumenta o diminuisce dipende da quali canali conduce quale canale. Il numero di contatori aumenterà di 4 o diminuirà di 4 ogni ciclo.
Dopo aver impostato il tipo di codifica e il tipo di conteggio degli impulsi, è possibile utilizzare la seguente formula per convertire le informazioni numeriche in Informazioni sulla posizione:
Per posizione di rotazione
Importo della rotazione ![]()
Dove n = numero di impulsi generati dall'encoder durante ogni rotazione dell'albero
x = tipo di codifica
Per posizione lineare
Dislocamento ![]()
Dove ppi = impulso per pollice (questo parametro si riferisce all'encoder selezionato)
Collegamento dell'encoder allo strumento <br> In questa sezione, prendi il modulo I/O digitale Ni CDAQ-9172 e il modulo I/O digitale della serie N 9401 C come esempio. L'uso di diversi strumenti e attrezzature di misurazione è simile a questo processo.
Equipaggiamento utilizzato:
CDAQ-9172: NI CompactDAQ Chassis USB a 8-slot Hi-Speed
NI 9401: 8-channel, 5 V/TTL ad alta velocità, modulo I/O digitale bidirezionale
24 encoder di quadratura a impulsi/rotazione
NI 9401 ha un connettore D-SUB che fornisce connettività per 8 canali digitali. Ogni canale ha una porta I/O digitale che può essere collegata a un dispositivo di input o output digitale. Solo attraverso il 5 ° e il 6 ° slot sul telaio puoi connetterti ai due contatori nel CDAQ-9172; Pertanto, inserire il 9401 nel 5 ° slot.
Secondo queste specifiche, la connessione A sull'encoder è collegata al pin 14 e la connessione B è collegata al pin 17 e "l'alimentazione a 5 VDC" è collegata a qualsiasi linea di cifre non utilizzata impostata su "alto". "" Connettiti a qualsiasi porta COM.
Inizia a misurare
Ora che l'encoder è stato collegato al dispositivo di misurazione, è possibile utilizzare il software di programmazione grafico NI LabView per trasferire questi dati su un computer per l'osservazione e l'analisi.
Estratto da: NI "Guida di misurazione generale"
Condividi:
Invia domanda
Ms. carol Dong
Numero Di Telefono:86-431-85543703
Fax:86-431---88634119
Mobile:+8613894866263
E-mail:sales@encoders.com.cn
Azienda Indirizzo:333Feiyue Donglu, Changchun City, Jilin Province. China, Changchun, Jilin
mobile Site
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.
Fill in more information so that we can get in touch with you faster
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.